前回には,TKM-Hで使用する部品と,それらを配置する基板について考えました.
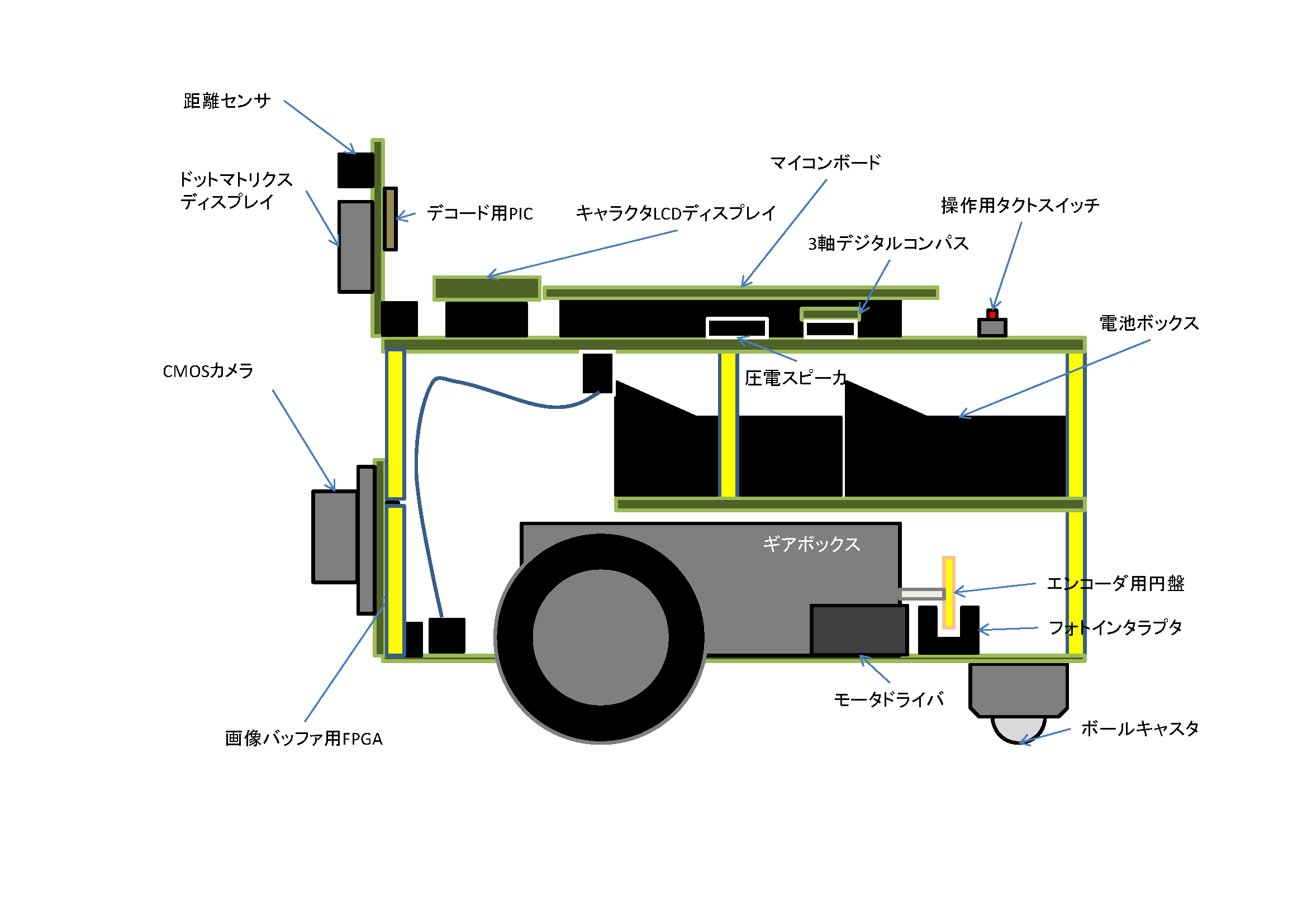
今回は,基板を組み立てたときの外観について考えてみます.基本的にはKTM-02のように独立して駆動する車輪2つがあり,それらにより旋回ができるライントレースカーとします.ただし,KTM-02と比べて多くの部品を搭載しなければならないため,マイコンボード搭載ボードは大きくせざるを得ません.また,カメラと距離センサは前方にあり,かつ基板が垂直にすることにしました.これらを踏まえた結果,次のような外観とすることとしました.
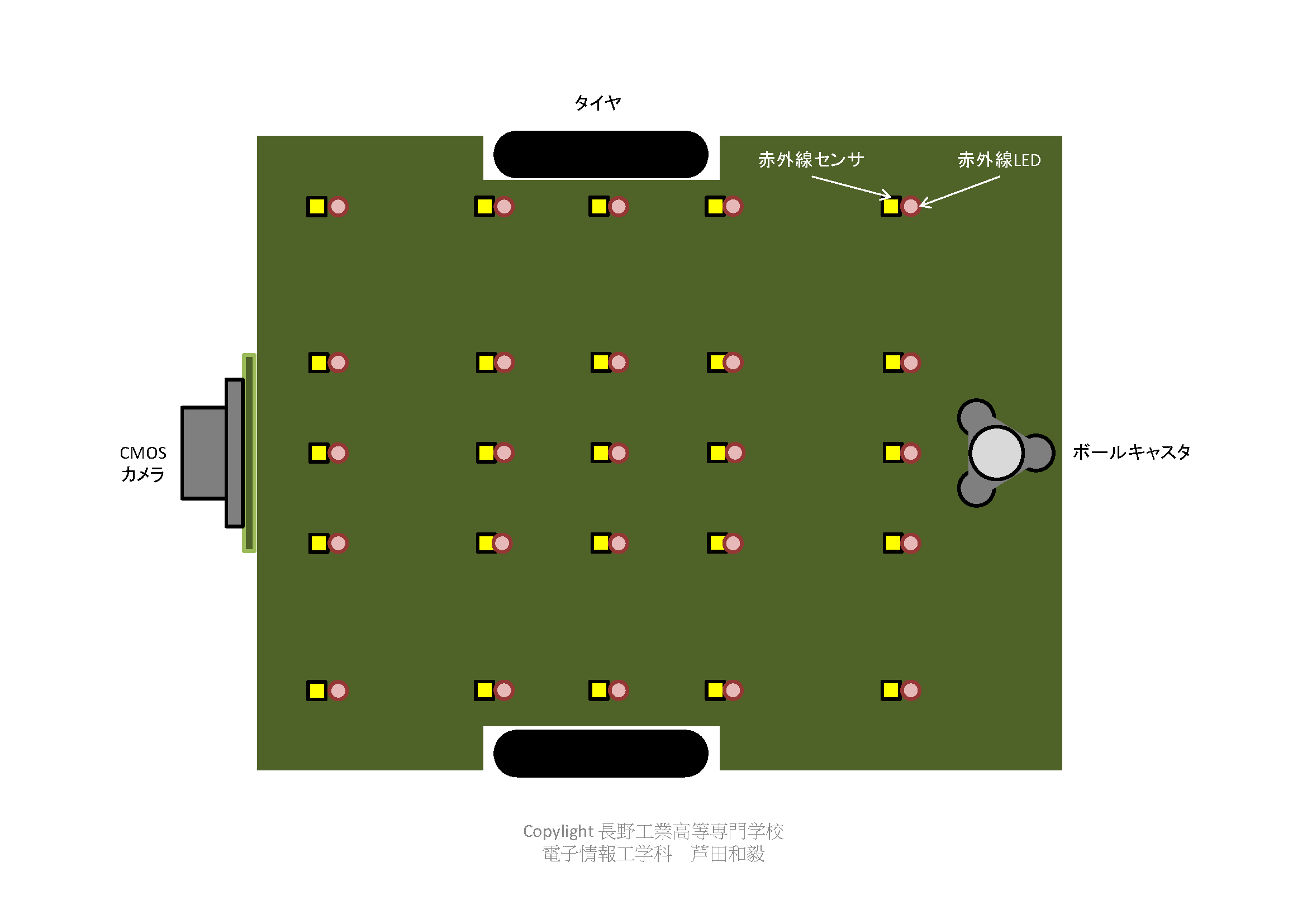
次に,ベースボードの底面にある赤外線センサの配置方法についても考えてみました.基本的にはKTM-02と同じく,ただ均等に配置するのではなく,中央には密に,外側には疎らにセンサを配置しました.
さらに,メインマイコンボード搭載ボードの外観も示します.なお,この図ではメインマイコンボードは搭載していません.
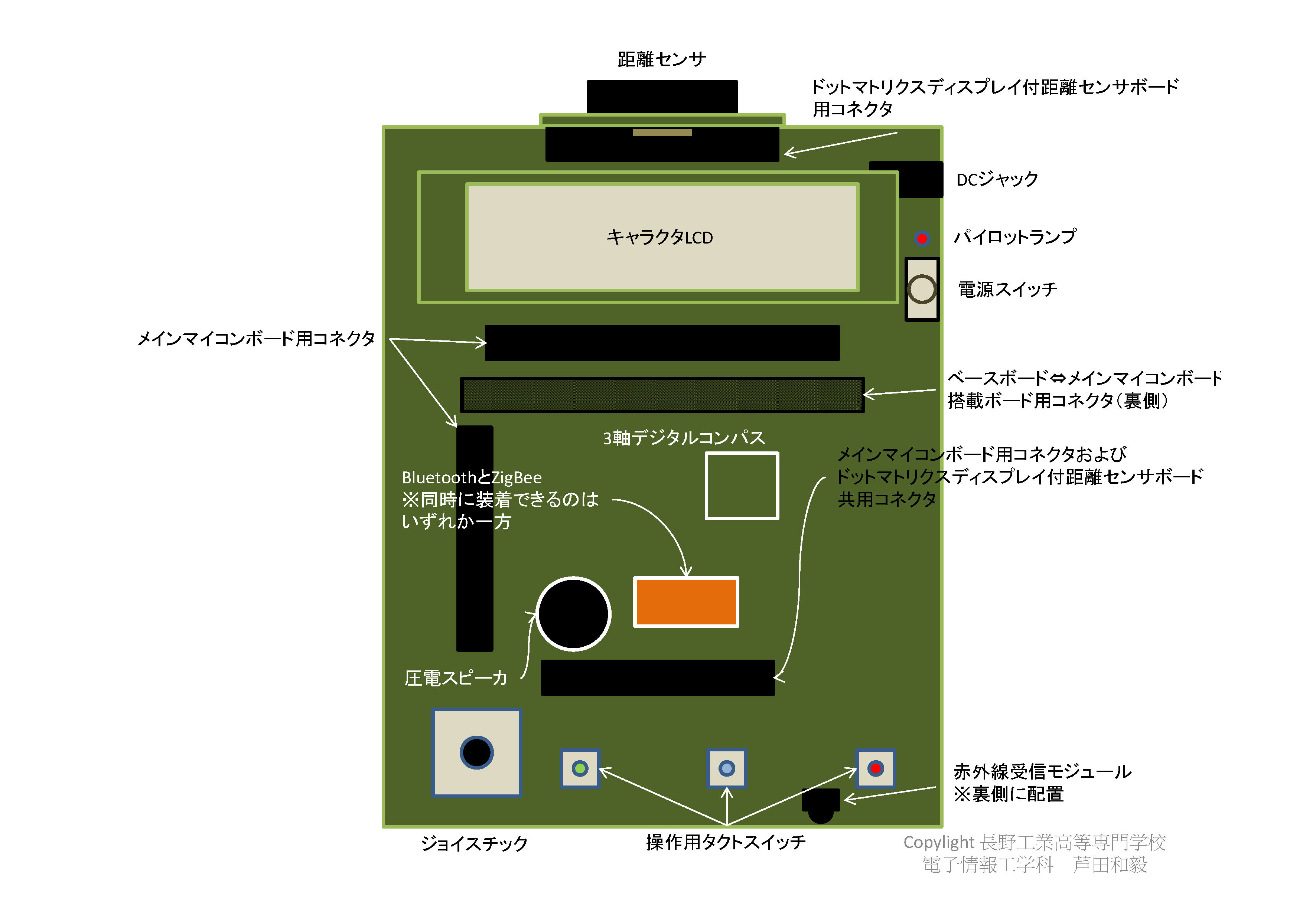
さて,お気づきになった方もいるかもしれませんが,メインマイコンボード搭載ボードの図の中央にある端子付近にに,メインマイコンボード搭載ボードおよびドットマトリクスディスプレイ付距離センサボード共用コネクタというものがあります.これはどういうことか,以下では説明します.
当初はTKM-Hで学べるマイコンは,基本的にメインマイコン,すなわちルネサス社製RXマイコンと,サブのマイコン,すなわちPICを考えていました.別の言い方をすれば,TKM-Hの本来の姿である自走車を実現するために必要な機能をメインマイコンとサブマイコンに実装する演習をしようとしていたということです.しかし,それではサブマイコンについては機能を特化したものしか演習に使えないということになりますので,せっかくなら,PICの基礎を学べる授業にも使えるようにしたいと考えるようになりました.
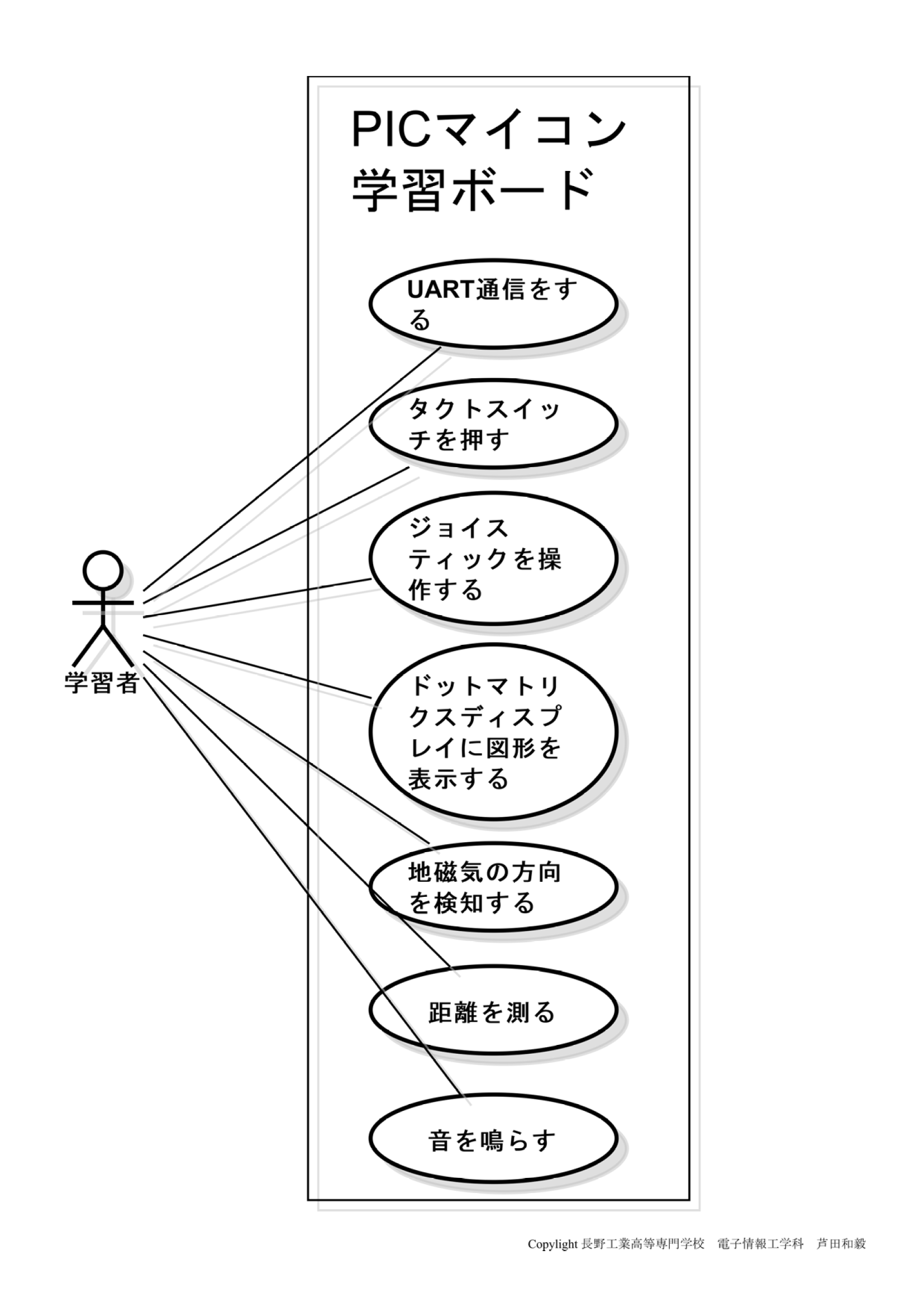
そこで目をつけたのがドットマトリクスディスプレイ付距離センサボードの利用です.このボードをTKM-H本来の機能を果たすための端子である,メインマイコンボード搭載ボードの端にあるコネクタに付けられるだけでなく,メインマイコンボードを搭載するコネクタにも付けられるようにすることにしました.こうすることで,ドットマトリクスディスプレイ付距離センサボードにあるPICで,メインマイコンボード搭載ボードについている入出力デバイスを制御することができます.もちろん,このような接続をしたときには,TKM-H本来の姿である自走車にはなりませんが,PICの初歩的な演習を行うことができます.このPIC学習ボードの要求定義を下に示します.
以上の図をもとに,次回は具体的な電子部品の選定を行います.