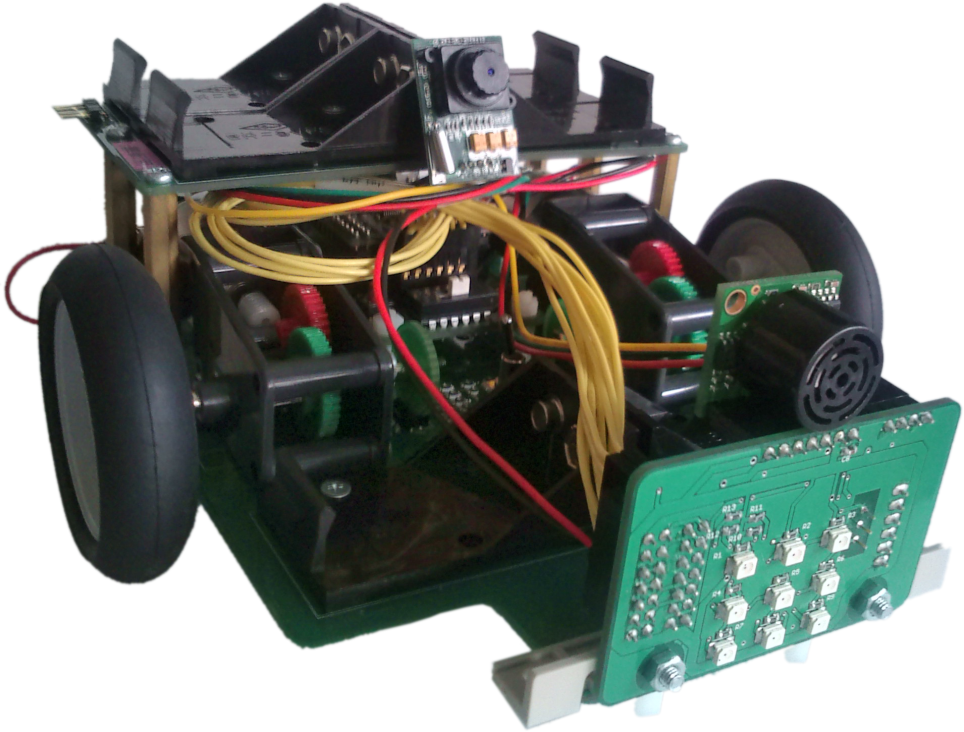
「設計を意識した組込み技術を学習できる教材」を基本理念としたマイコンとCPLDを使った自走車KTM-02を開発しました.KTM-02の外観と使用した素子を下に示します.
- マイコン[ルネサス社製SuperH7125Tiny]:1個
- 赤外線センサ制御用CPLD[Xilinx社製XC95108TQ144-15]:1個
- 赤外線センサ[浜松ホトニクス社製S10053]:25個
- Bluetooth[Sparkfun社製WRL-00582]:1個
- CPLD[Xilix社製XC9536-7VQ44C]:1個
- CMOSカメラ[COMedia社製C328-7640]:1個
- 距離センサ[Sparkfun社製LV-EZ1]:1個
- モータドライバ[東芝社製TA8440H]:2個
- キャラクタLCD[SUNLIKE社製SC1602BS-B]:1個
の自走車の底面には25個の赤外線センサが取り付けられているため,交点のある線を的確に感知することが可能となっています.また,Bluetoothによる通信を行うことができるようにしたため,パソコンによる遠隔操作することが可能です.さらに,CMOSカメラや距離センサが取り付けられているため,KTM-02周辺の状況をパソコンに伝えることも可能です.
KTM-02には上記の素子をマイコンやCPLDにより制御する方法を学習する教材として用いることが可能ですがそれだけではなく,UMLを基軸とした設計方法についても学べるように配慮しました.また,パソコンと通信することが可能であるため,パソコン上で動作する操作アプリケーションを作成する学習用教材としても用いることができます.具体的には,KTM-02を操作するコマンドを発行する通信フレームワークを学生に提供し,それを用いて独自のアプリケーションを作らせることができます.
成果物
※ チェンジビジョンのastah*でご覧ください.