Raspberry Piで操作するRCカーを作っています.名前はRPiCarです.特に小型化したいという思いから,Raspberry Pi zeroを使っています.Raspberry Pi zeroでもカメラやI2C接続の距離センサも扱えます.zeroを用いたことにより,幅,高さ,奥行きともに10㎝程度になっています.いくつかの試作を得て現在のバージョンが5代目です.最初はRCカーのみを考えていましたが,どうせなら自走車も目指すことにし,そのためにフォトリフレクタを底面に配ししました.上の基板と下の基板の間をつなぐコネクタについて,フォトリフレクタを追加するために増やす必要がありましたので,ついでに前面にヘッドライトを付けることとしました.下に図を示します.左側下方にフォトリフレクタ3個とヘッドライトが付いているのが分かるでしょうか.さらに5代目にはLiDARを搭載してRPiCarの周りの物体までの距離を計測できるようにしてみました.
こちらが俯瞰図です.

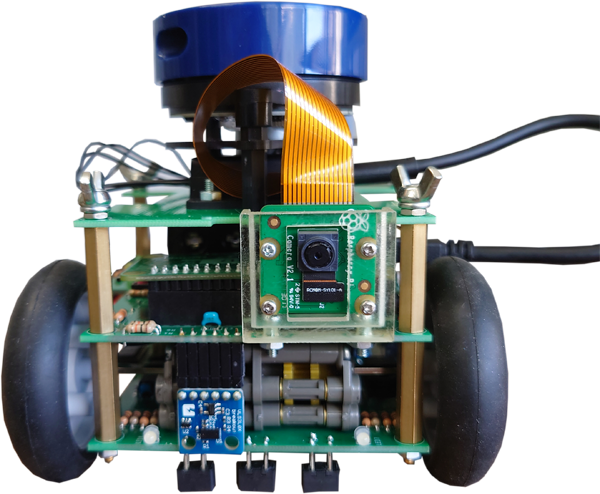
こちらが正面です.最上部にLiDAR,上側にカメラと距離センサがあります.下側にはフォトリフレクタが3個ついています.
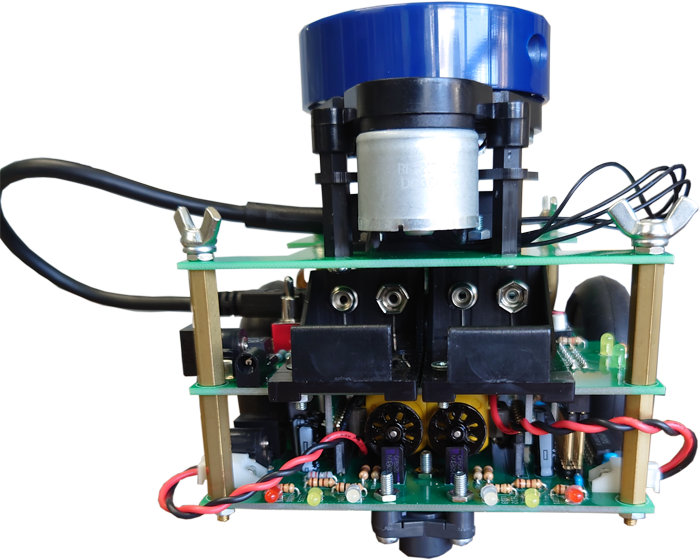
こちらが背面です.2つの独立したモータにより旋回が行えます.さらに,そのモータの回転軸には穴の開いた円盤があり,その円盤の下にはフォトインタラプタがあります.これにより回転数を検知することができます.
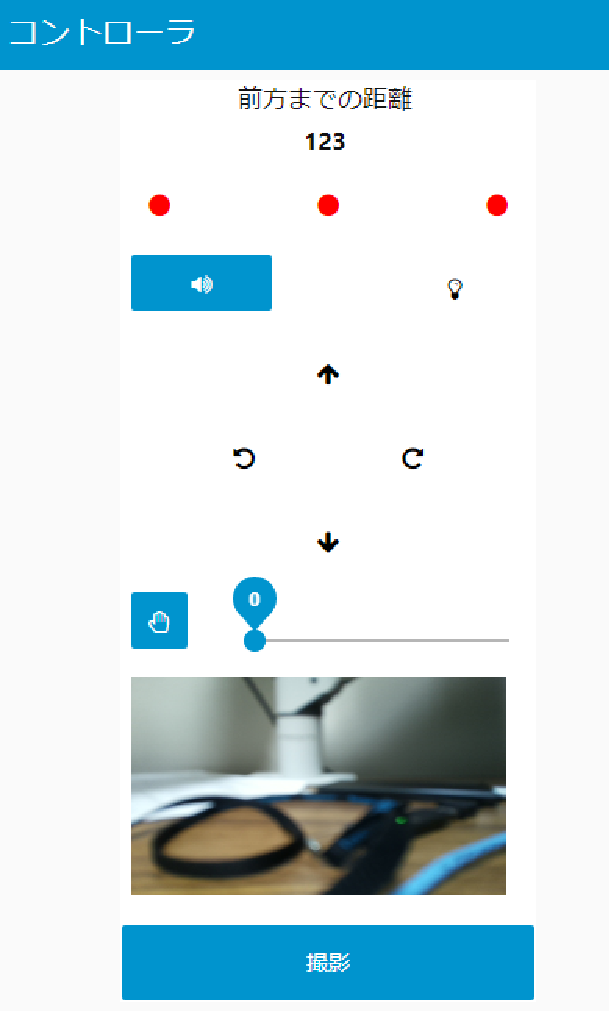
上記のRCカーを制御をブラウザから行えます.下のようにボタンが配置されており,これを押すことで制御できます.加えて,前方にある障害物までの距離や,カメラで撮影された写真が表示されるようになっています.
最後にブロック図を示します.上側基板と下側基板に実装した部品と,その接続状況を記してあります.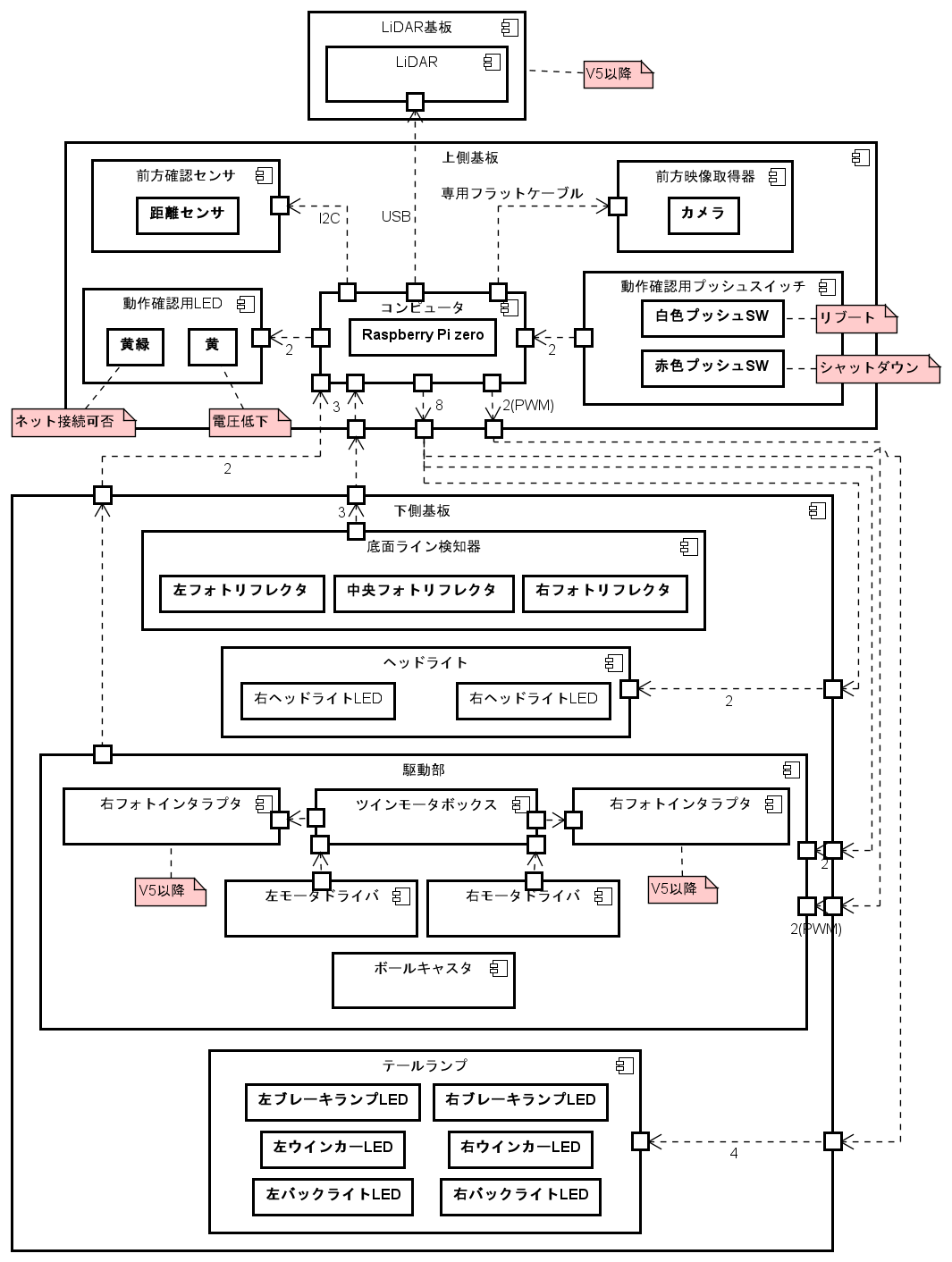
すでにNode-REDによる制御ができることも確認済みです.残念ながら令和2年度にはコロナの影響で講座を実施できませんでしたが,次年度は実施したいと考えています.