北斗電子のRX62N搭載ボードHSBRX62N-Aがようやく到着し,これまで作ってきたメインマイコン搭載ボードに搭載しました.
下の写真に,このマイコンボードを搭載し,さらにE1エミュレータと接続した様子を示します.
ついでに,ドットマトリクスディスプレイ付距離センサボードとカメラボード(一部未実装)も示します.

さて,これでとりあえずは,メインマイコン(RX62N)とドットマトリクスディスプレイ付距離センサボードに搭載しているマイコン(PIC16F1936)の2つについては動作確認ができることとなりました.まずは,E1によりRX62Nの動作確認をしていこうと思います.なお,開発環境はHEWとルネサスのC/C++コンパイラとなっています.
実はE1は1年位前に購入しておいたのですが,私自身,一度もまた使っておりませんでした.初めてE1を使うということで,ダウンロードからデバックまでの手順がわからず,すこし手間取りました.今日は,ここまでの手順について備忘録的に書いておきたいと思います.
まず,RX62N搭載のマイコンボードのモード選択スイッチSW2についてです.このスイッチでマイコンの動作モード,エンディアンおよびデバッカ用端子EMLEの設定が行えます.
まず結論を言うと,すべてOFFにすればよいようです.これにより,シングルチップモード,ビッグエンディアン,そしてEMLEをHIGHにできます.
ただし,今回はビッグエンディアンを使うため,HEWのメニューにあるビルド⇒RX Standard Toolchainのなかにあるエンディアンの設定を変更しました.その様子が下の絵です.

次に,HEWで行うE1接続までの流れです.あらかじめ,E1のドライバをインストールし,マイコンボードとE1を接続しておきます.
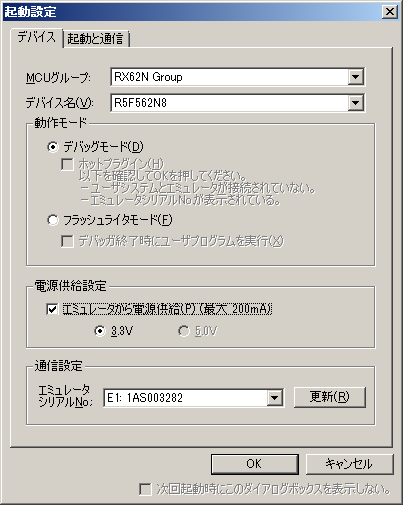
その後,HEWのメニューにあるデバッグ⇒接続を押し,E1と接続するための設定を行います.
まず,下に示す設定です.これにより,E1から電力を供給することができます.
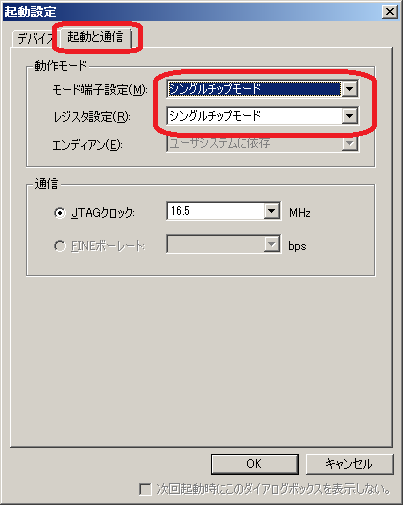
次に,起動と通信タブを選択し,モード端子設定をシングルチップモードにします.この設定をしましたら,OKボタンを押します.
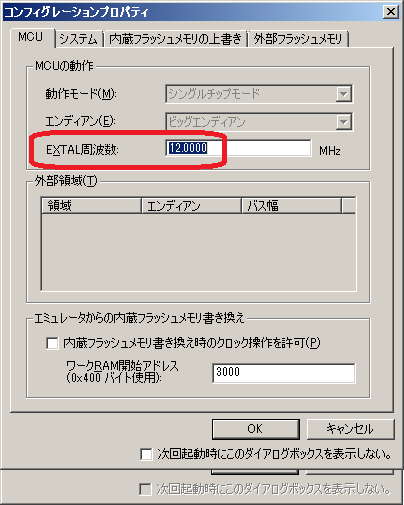
次に,EXTAL周波数を設定します.これはマイコンに取り付けられている発振子の周波数を記述します.HSBRX62N-Aの場合,12[MHz]です.
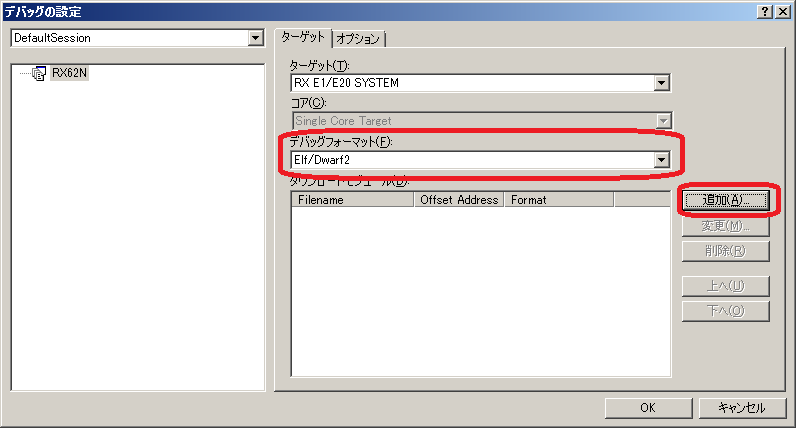
次に,マイコンにダウンロードするファイルを指定します.HEWのメニューにあるデバッグ⇒デバッグの設定を選択します.すると,次のようなダイアログが現れます.ここで,デバッグフォーマットをElf/Dwarf2とし,さらに追加ボタンを押します.
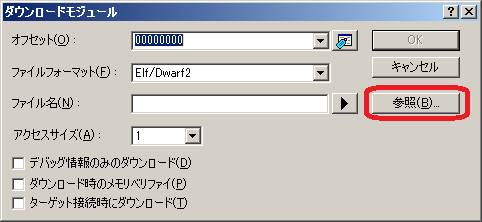
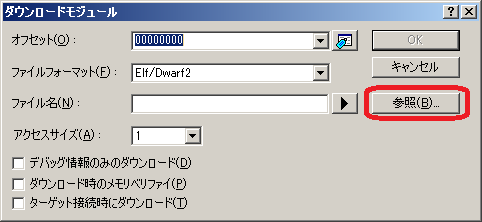
次に,ダウンロードするファイルを選択するため,下にあるダイアログの参照ボタンを押します.あとはOKボタンを押してください.
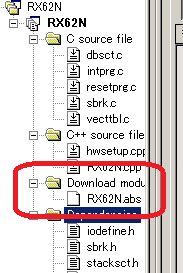
これでダウンロードファイルの指定は終わりです.うまくできますと,下のようにHEWのプロジェクトツリーにabsファイルが追加されているはずです.
次に,ダウンロードしてみます.上に示したファイルを右クリックし,ポップアップメニューからダウンロードを選択します.これでダウンロードは終了です.
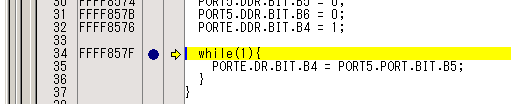
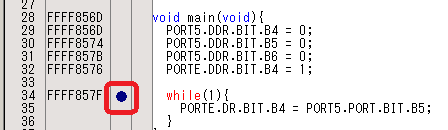
最後に,デバッグ方法です.まずはブレイクさせたいソースの行を下のようにマークします.
あとは,HEWのメニューのデバッグ⇒リセット後実行を選択します.うまくいくと,下のようになるはずです.