前回に引き続き,TKM-Hのはんだ付けをしました.あと残っているのはベースボードとカメラボードです.まずはじめに,ベースボードを実装しました.
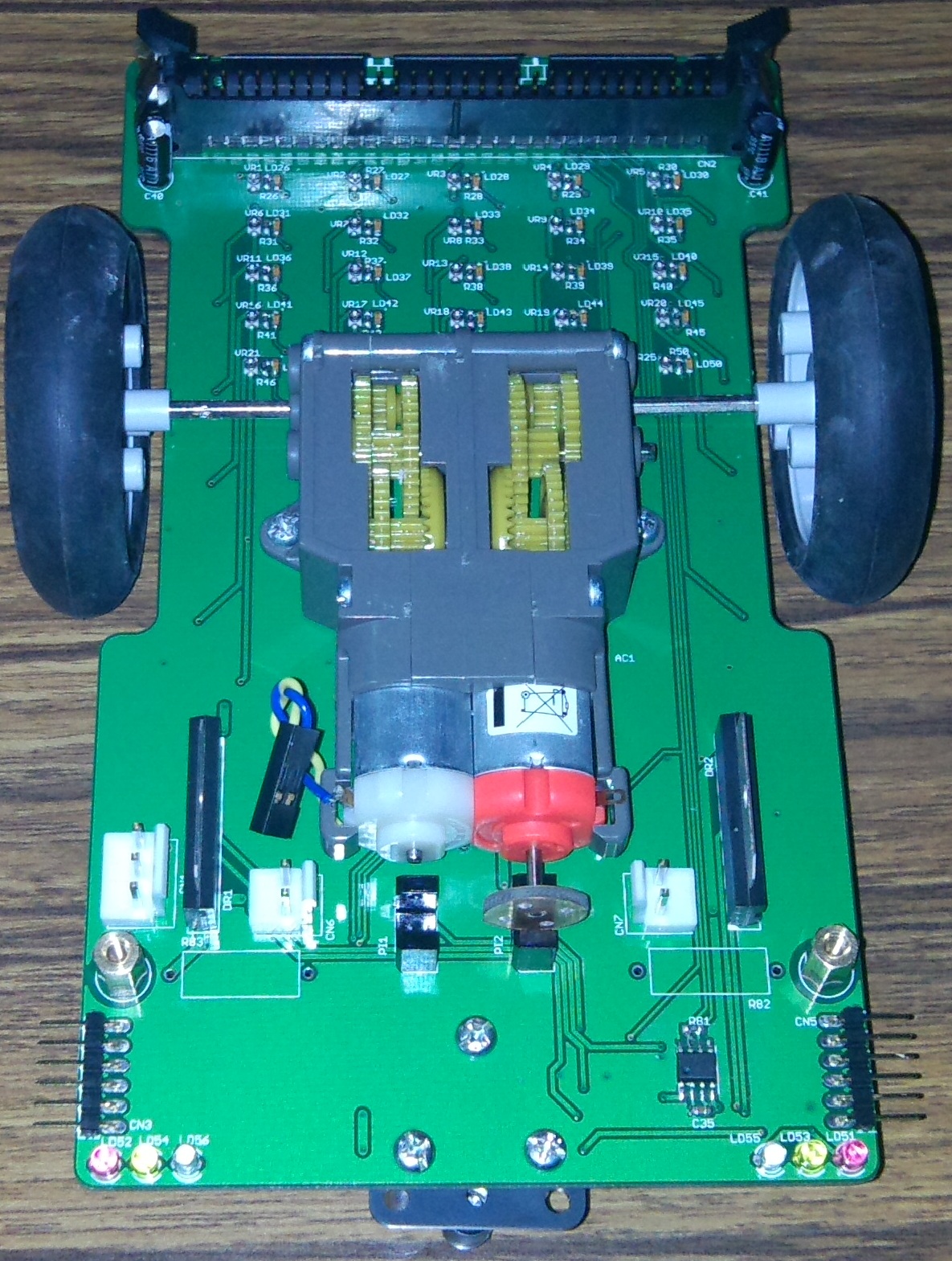
上の画像がベースボードの表面です.上部のコネクタはメインマイコンボード搭載ボードと接続するためのもので,その下には,赤外線センサを調整するための,25個のLEDと25個の可変抵抗器があります.さらに,中央にはダブルギアボックスがありますが,モータが左右で異なってしまっています.実際に使うときには,右側にある両軸モータを左側にもつける予定です.最後に,下部左右には3つずつLEDがあり,これはブレーキライト,ウィンカおよびバックライトを模したものです.
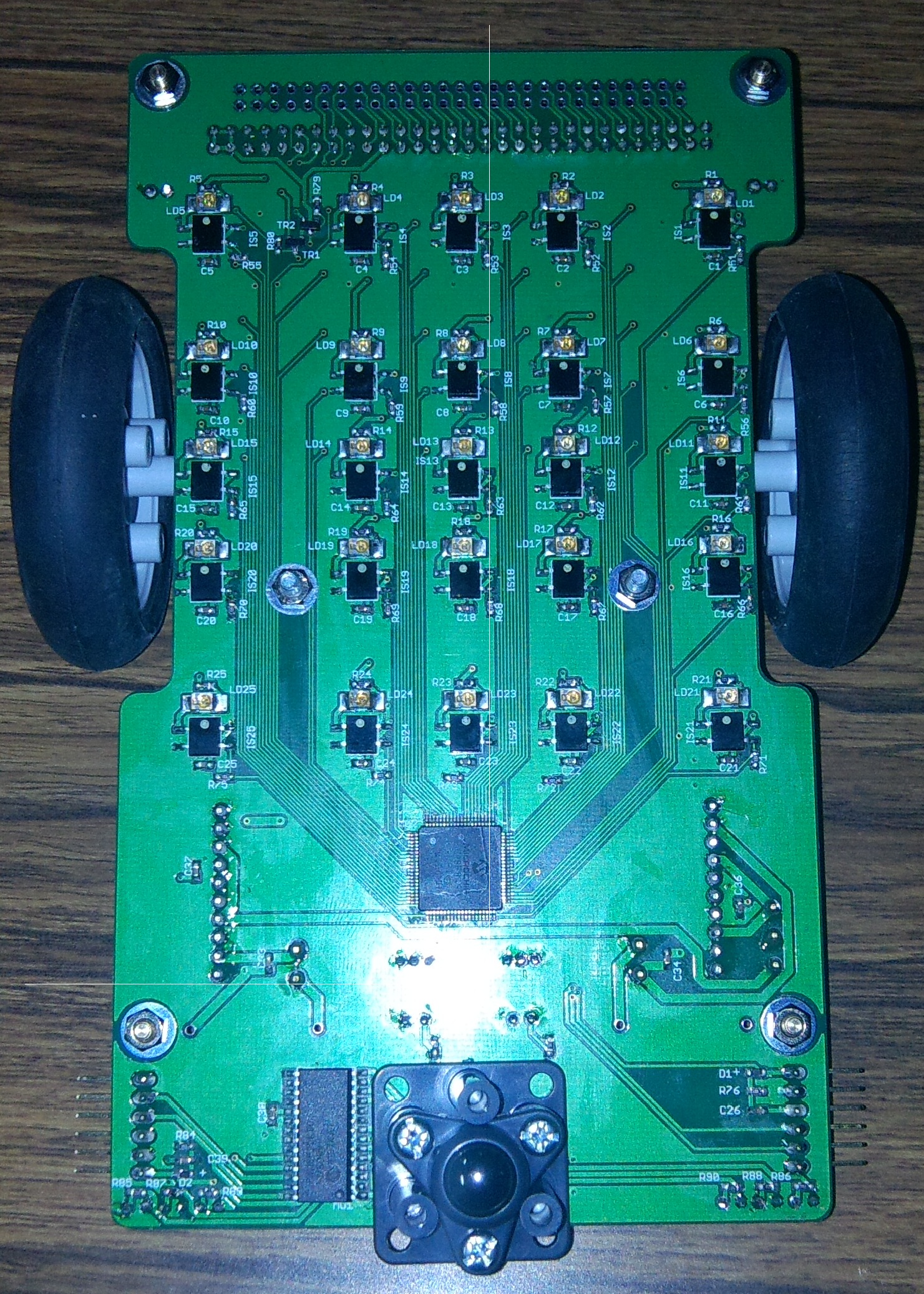
上の画像はベースボードの裏面です.中央付近に25個の赤外線LEDおよび赤外線センサがあります.下部にはボールキャスタがありますが,ご覧の通り,基板からはみ出てしまっています.この問題は次のバージョンでは解決する予定であり,既にパターンの修正をしました.
次に,カメラボードを実装しました.その様子を次に示します.
まず,カメラボードの表側です.上部にあるコネクタはカメラと接続するためのものです.また,右側にあるICは画像を保持するためのSRAMその1,右下にはカメラの電源用レギュレータがあります.
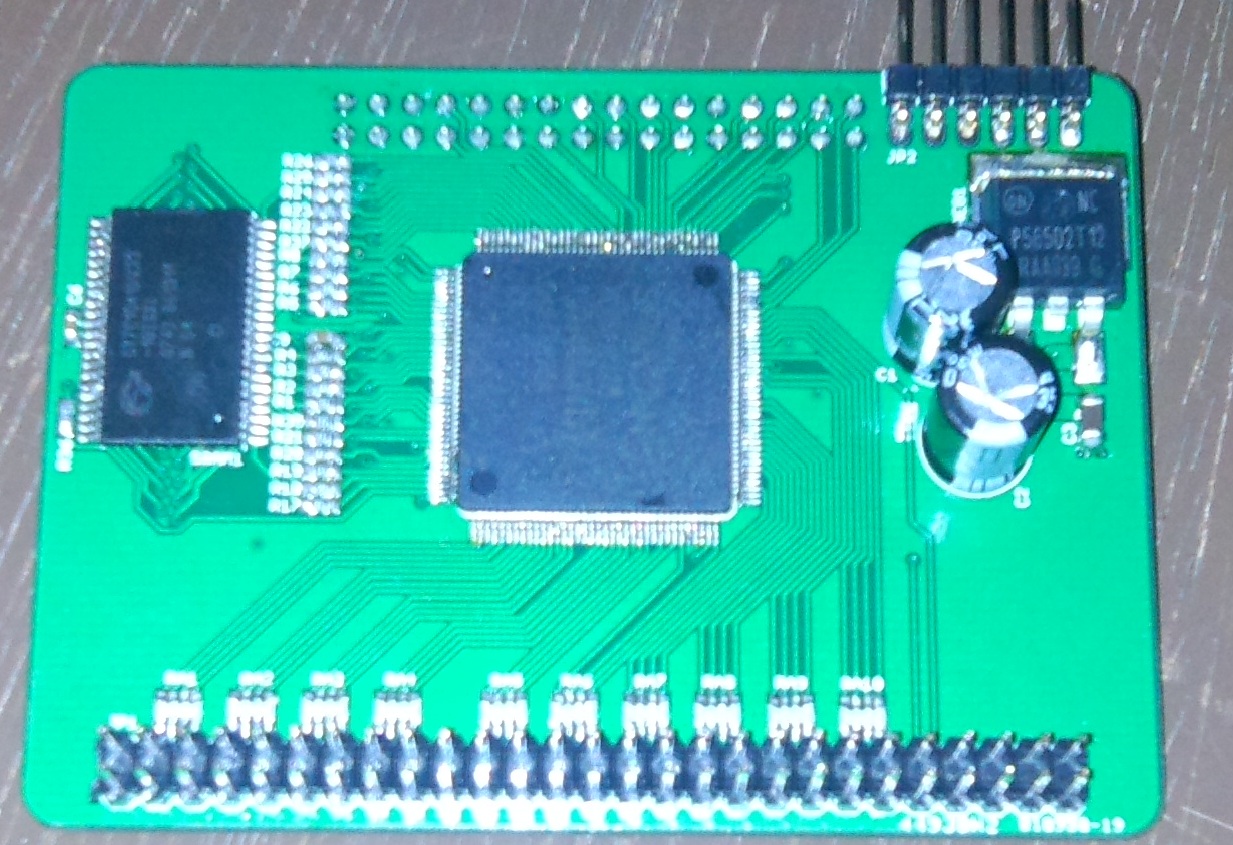
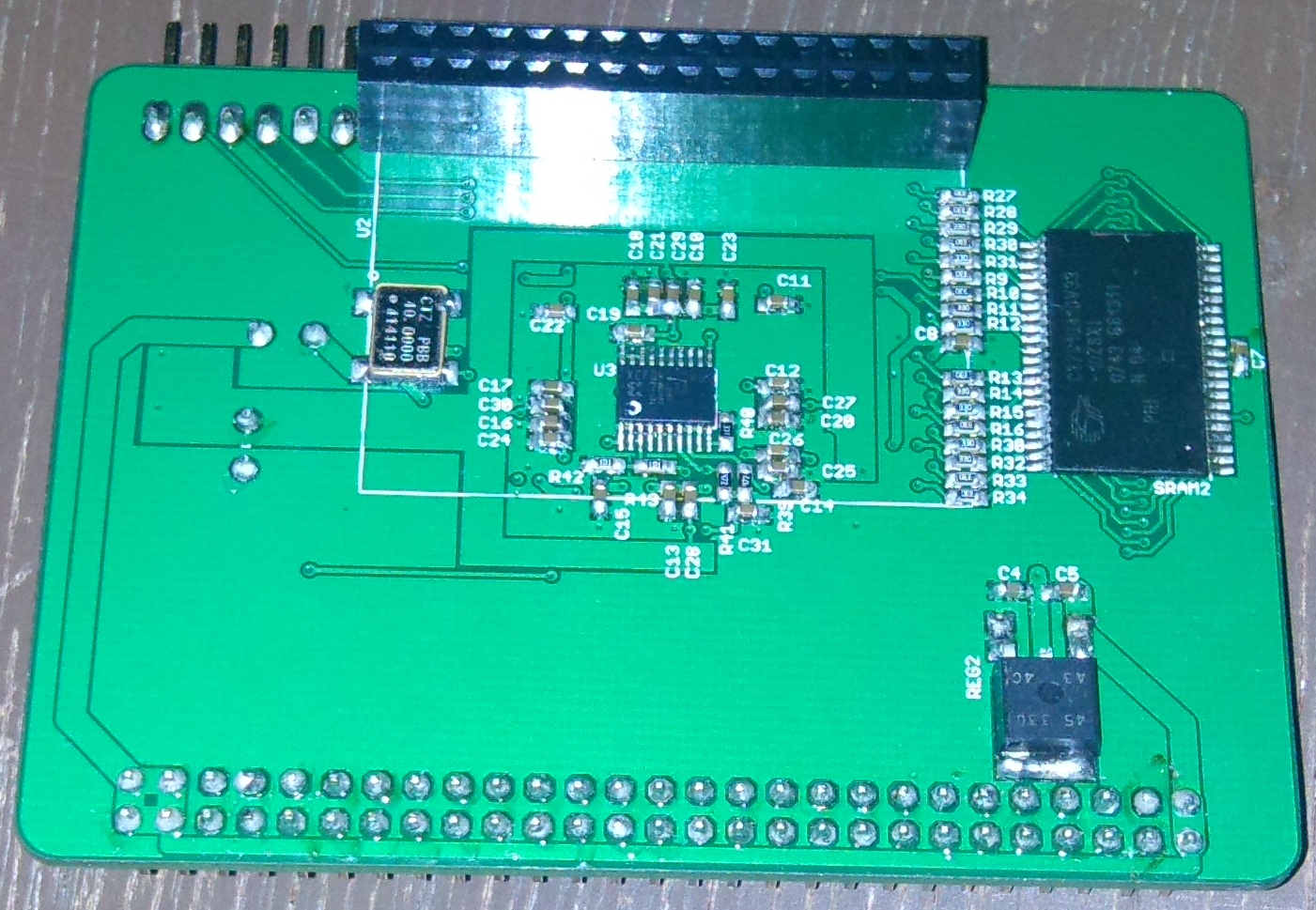
つぎに,カメラボードの裏側です.中央にはFPGA,左側にはSRAMその2,右側にはFPGAの内部電源用レギュレータです.
さて,これらの基板をすべて合体した様子を次に示します.
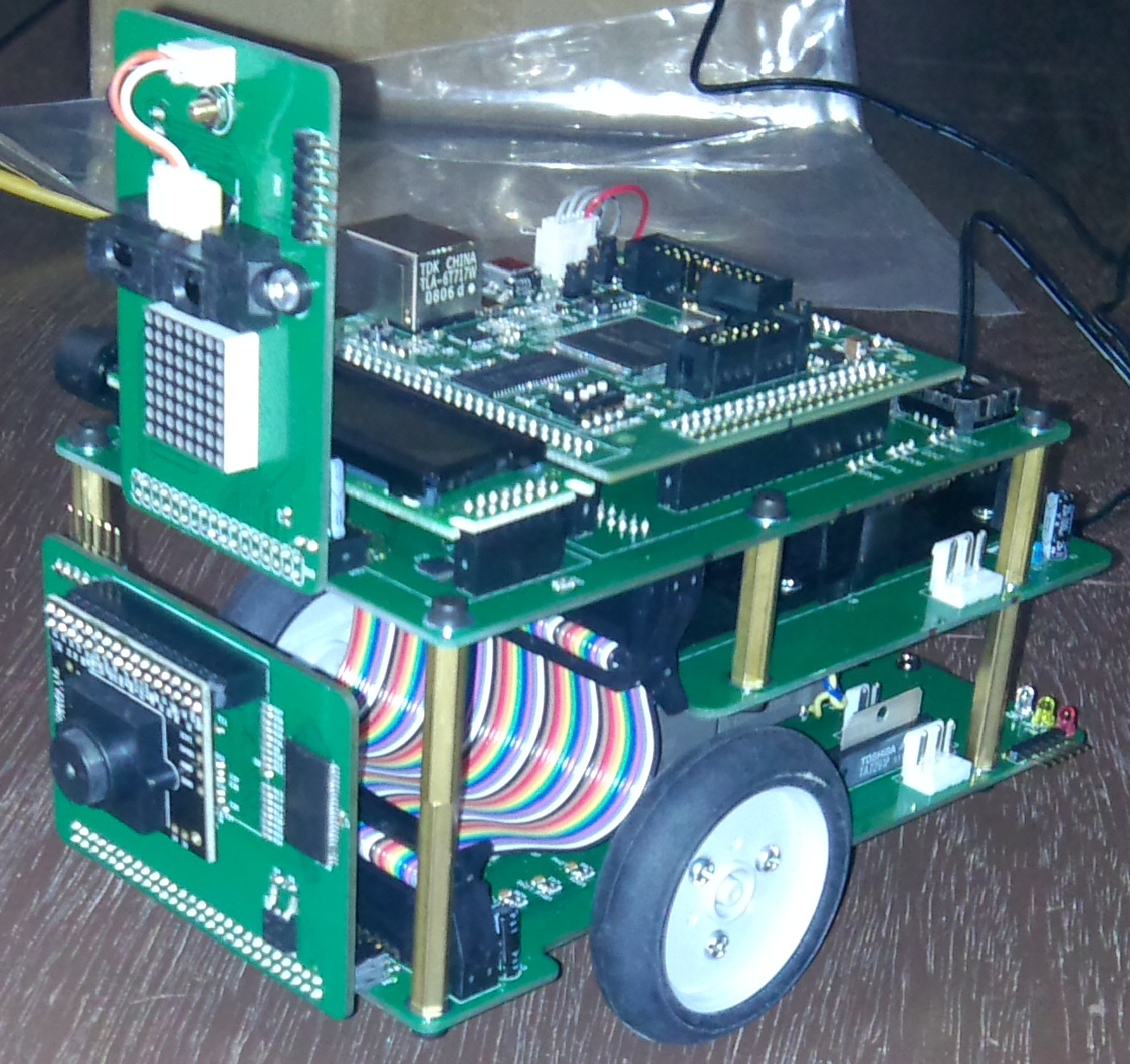
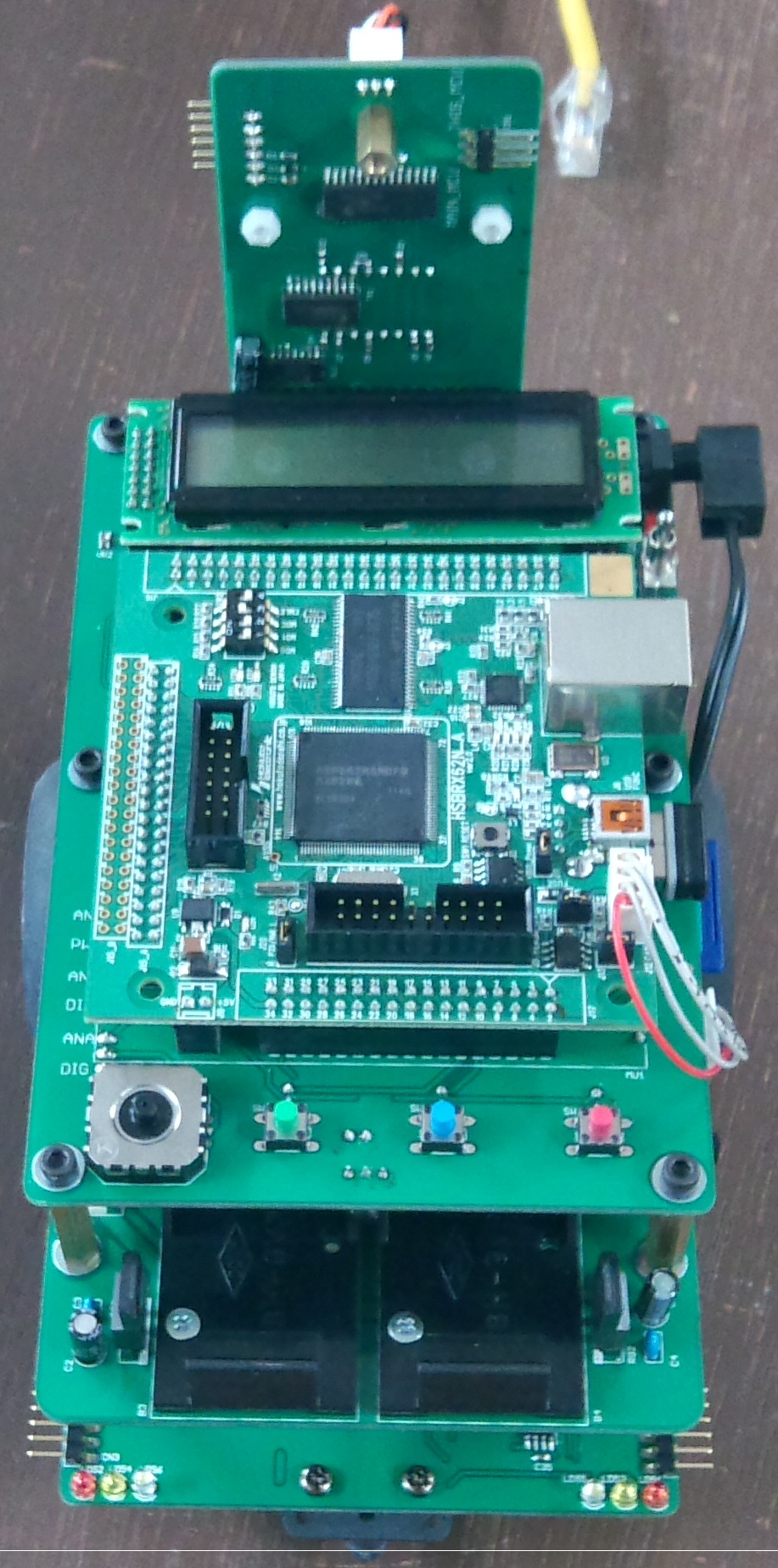
まず,俯瞰した図を示します.ご覧の通り,4段に基板がスタックされており,下からベースボード,電源ボード,メインマイコンボード搭載ボード,メインマイコンボードとなっています.
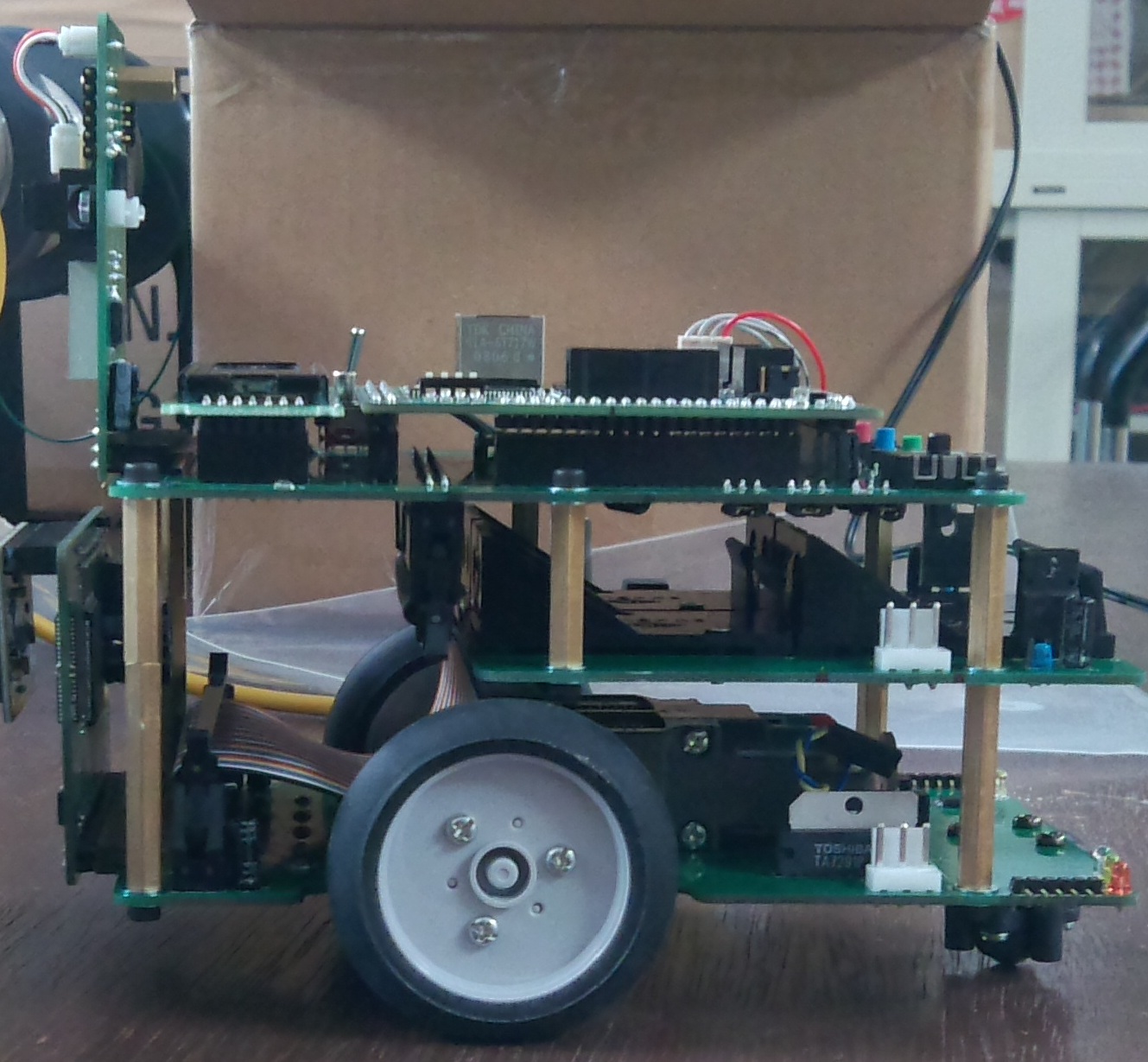
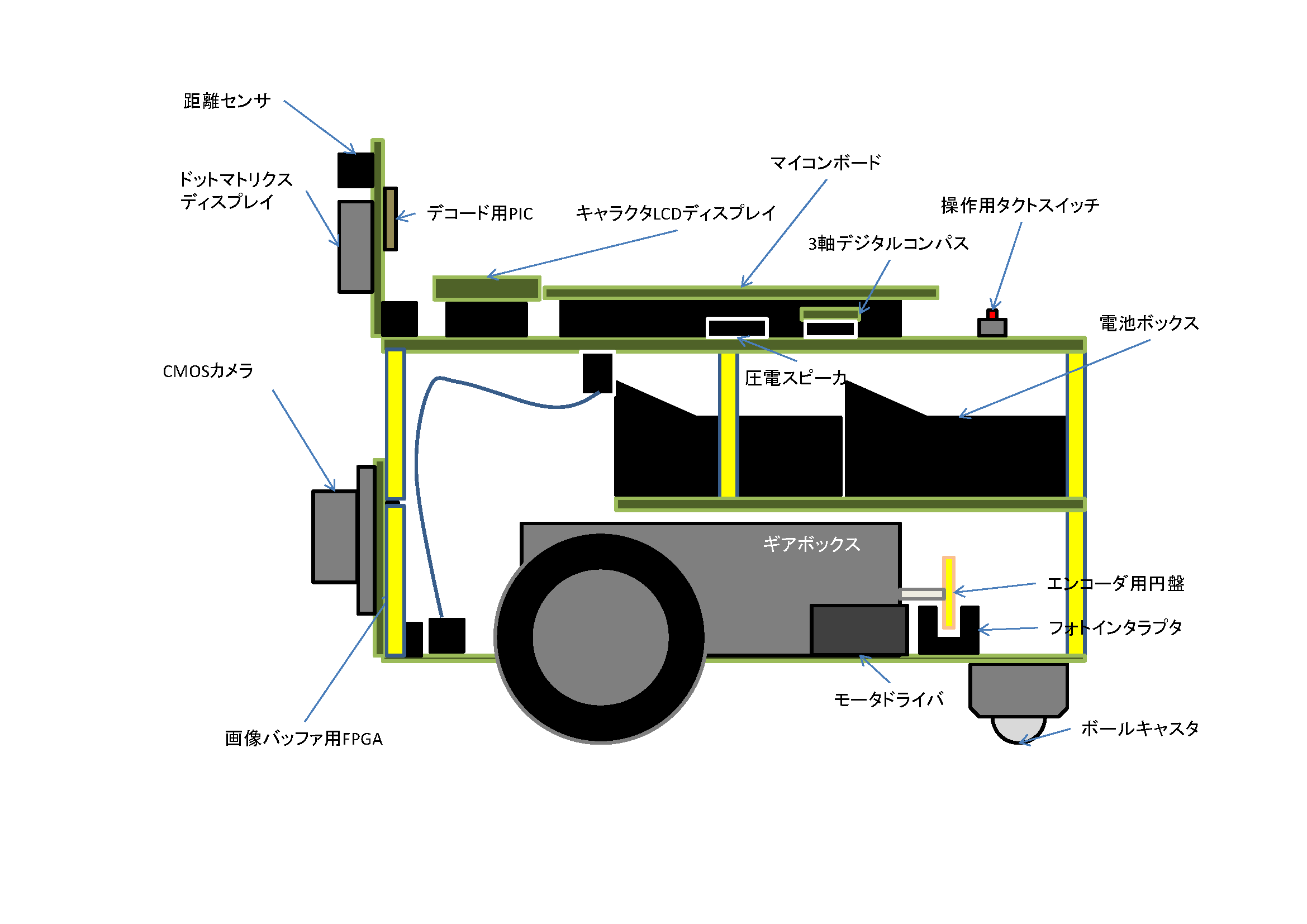
次に,TKM-Hの進行方向を上に見たとき左となる側の写真と,当初予定していた外観を示します.ほぼ予定通りにできたことがわかります.
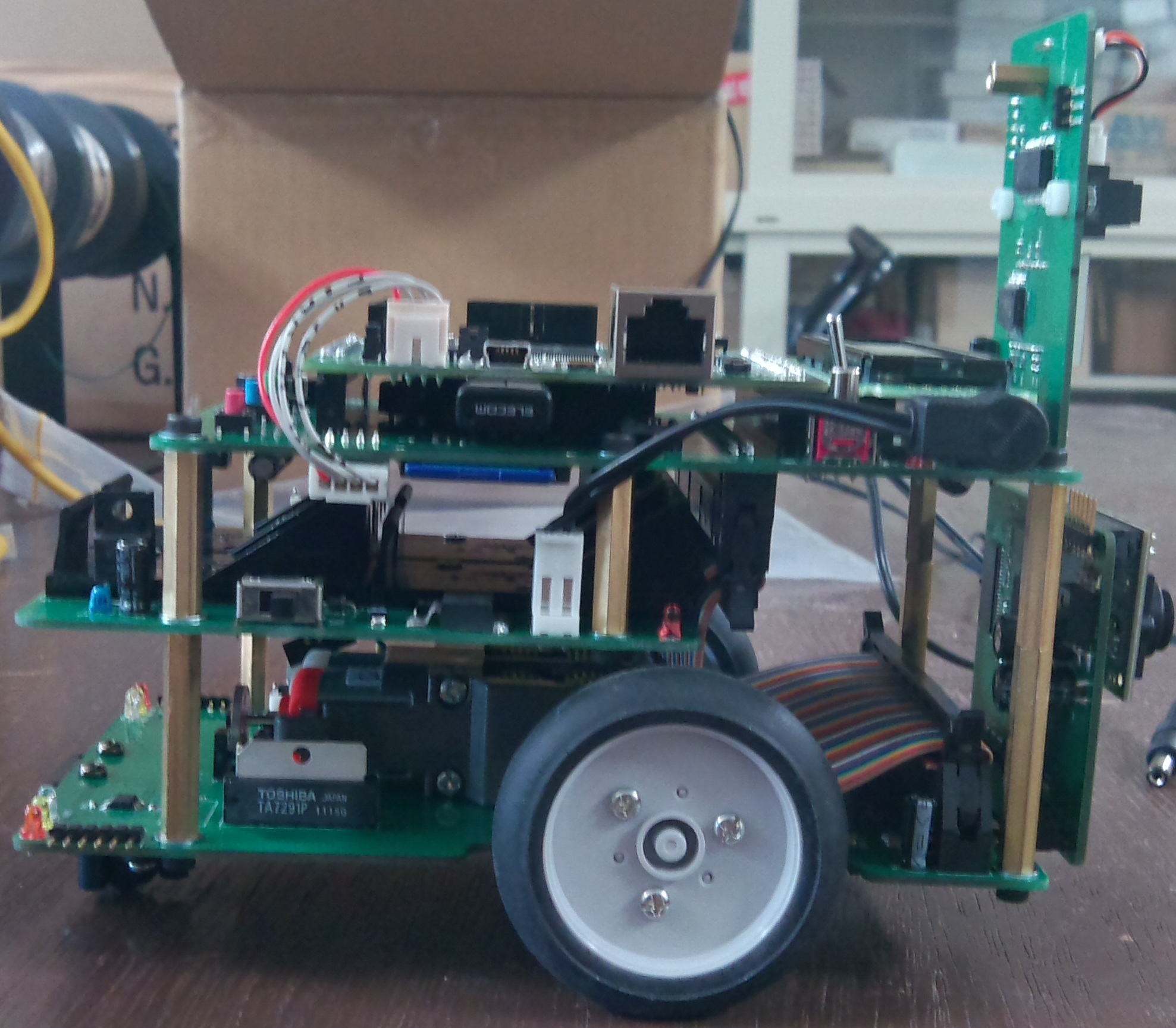
次に,右側の写真を示します.USB,SD,電源など,多くのコネクタは右側に集中しています.これは,右利きであることを考慮したためです.
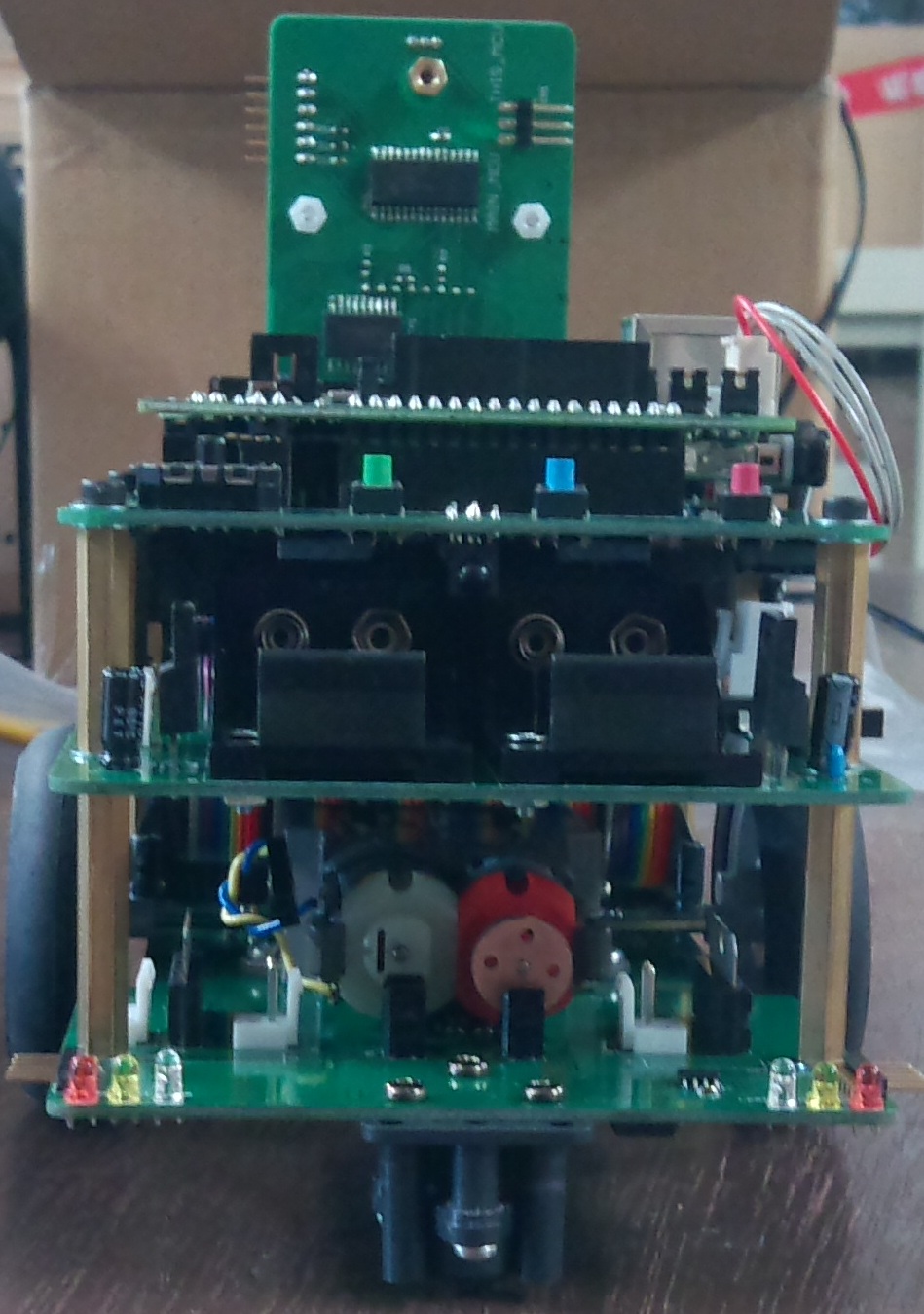
次に,後ろ側の写真を示します.
最後に,TKM-Hを上から見た様子を示します.
これですべての基板の実装がすみました.次はプログラムを実装をしていきます.